Learning to control
Robots are increasingly equipped with multiple, redundant, sensing modalities (inertial, force, tactile or visual perception) and it remains a significant challenge to efficiently use this information to create robust behaviors in unknown environments. Further, robots are seldom capable of learning new or improving known behaviors as they collect more real-world experience. To address this challenge, we design learning algorithms capable of using multi-modal sensory data to:
- learn dynamic models to anticipate the consequences of robot actions
- learn control policies from simulation, trial and error or human demonstrations
- learn cost and value functions to capture desired goals and behaviors
Importantly, we test all of our learning algorithms on real robot for manipulation and locomotion tasks to ensure that they are robust to real noisy sensors and imperfect actuators.
Videos
Selected publications
-
A.
Meduri,
H.
Zhu,
A.
Jordana,
L.
Righetti,
"MPC with Sensor-Based Online Cost Adaptation,"
in 2023 IEEE-RAS International Conference on Robotics and Automation (ICRA),
May,
2023.
-
J.
Viereck,
A.
Meduri,
L.
Righetti,
"ValueNetQP: Learned one-step optimal control for legged locomotion,"
in Proceedings of The 4th Annual Learning for Dynamics and Control Conference,
pp. 931–942,
Jun,
2022.
-
M.
Bogdanovic,
M.
Khadiv,
L.
Righetti,
"Model-free Reinforcement Learning for Robust Locomotion using Demonstrations from Trajectory Optimization,"
Frontiers in Robotics and AI,
2022.
-
A.
Jordana,
J.
Carpentier,
L.
Righetti,
"Learning Dynamical Systems from Noisy Sensor Measurements using Multiple Shooting,"
,
no. arXiv:2106.11712,
Jun,
2021.
-
A.
Meduri,
M.
Khadiv,
L.
Righetti,
"DeepQ Stepper: A Framework for Reactive Dynamic Walking on Uneven Terrain,"
in 2021 IEEE-RAS International Conference on Robotics and Automation (ICRA),
May,
2021.
-
J.
Viereck,
L.
Righetti,
"Learning a Centroidal Motion Planner for Legged Locomotion,"
in 2021 IEEE-RAS International Conference on Robotics and Automation (ICRA),
May,
2021.
-
S.
Bechtle,
A.
Molchanov,
Y.
Chebotar,
E.
Grefenstette,
L.
Righetti,
G.
S.
Sukhatme,
F.
Meier,
"Meta-learning via learned loss,"
in 25th International Conference on Pattern Recognition,
Jan,
2021.
-
S.
Bechtle,
B.
Hammoud,
A.
Rai,
F.
Meier,
L.
Righetti,
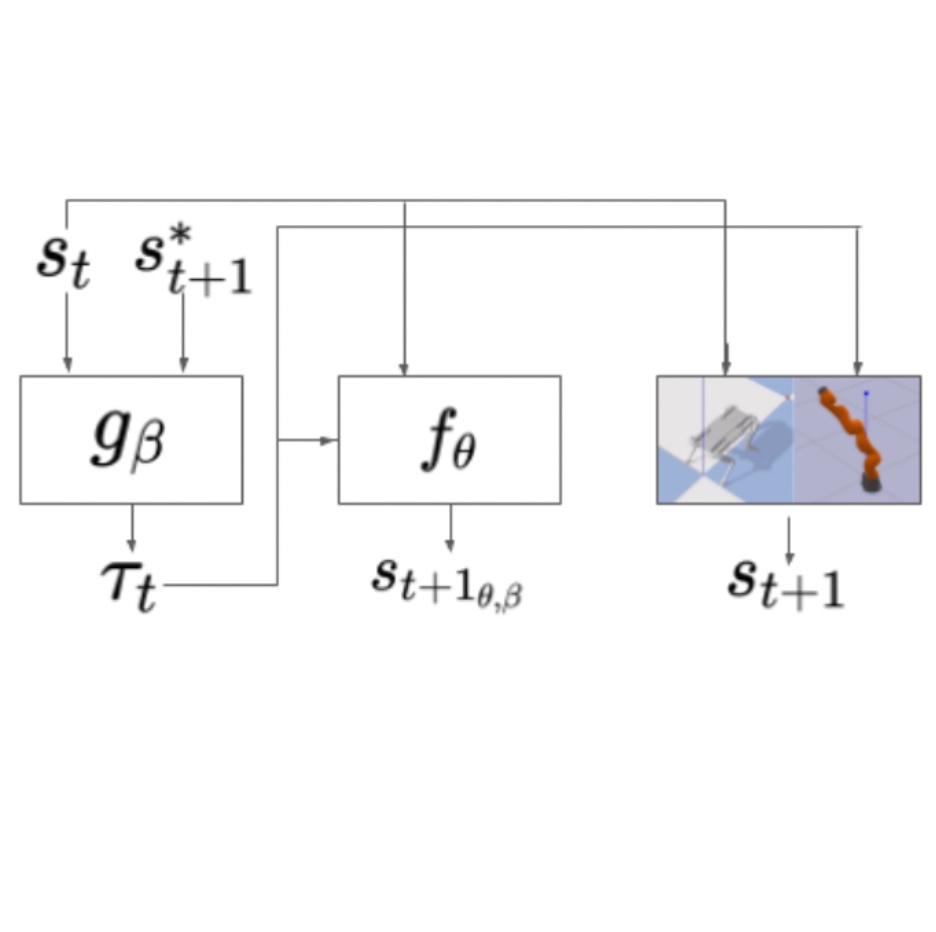
"Leveraging Forward Model Prediction Error for Learning Control,"
in 2021 IEEE-RAS International Conference on Robotics and Automation (ICRA),
May,
2021.
-
M.
Bogdanovic,
M.
Khadiv,
L.
Righetti,
"Learning Variable Impedance Control for Contact Sensitive Tasks,"
IEEE Robotics and Automation Letters,
vol. 5,
no. 4,
pp. 6129–6136,
2020.
-
S.
Bechtle,
Y.
Lin,
A.
Rai,
L.
Righetti,
F.
Meier,
"Curious iLQR: Resolving Uncertainty in Model-based RL,"
in Proceedings of the Conference on Robot Learning,
pp. 162–171,
Nov,
2019.