Research
Current activities
Software
Most of our software is open-source and available on the laboratory Github. In particular, you might be interested in the following packages:
- MimSolver, an efficient sparse SQP solver for nonlinear trajectory optimization and MPC with hard constraints.
- BiConMP, a solver for whole-body nonlinear trajectory optimizer used on a variety of legged robots, both for closed-loop MPC and offline trajectory generation.
- A stagewise Newton method for dynamic game control with imperfect state observation
- iRiSC, an efficient solver for risk sensitive optimal control for nonlinear systems with imperfect observations
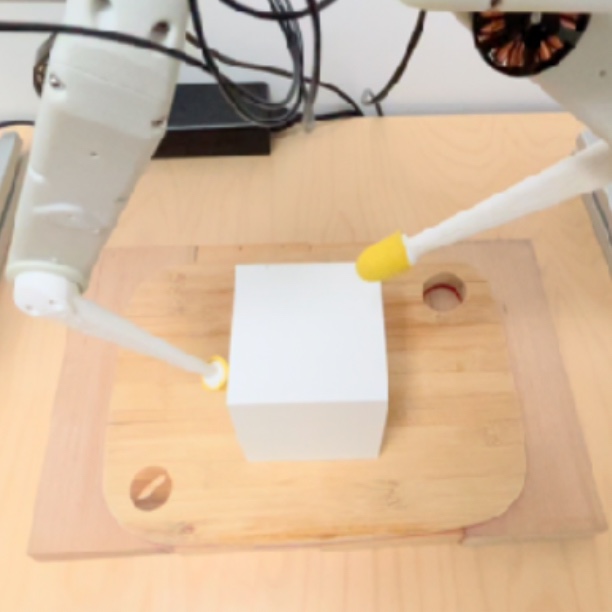
- Contact planning for object manipulation using Monte-Carlo Tree Search and learned value functions using trajectory optimization
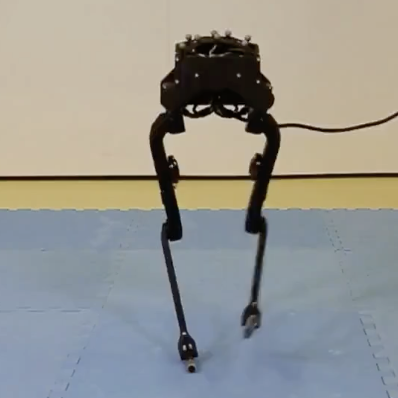
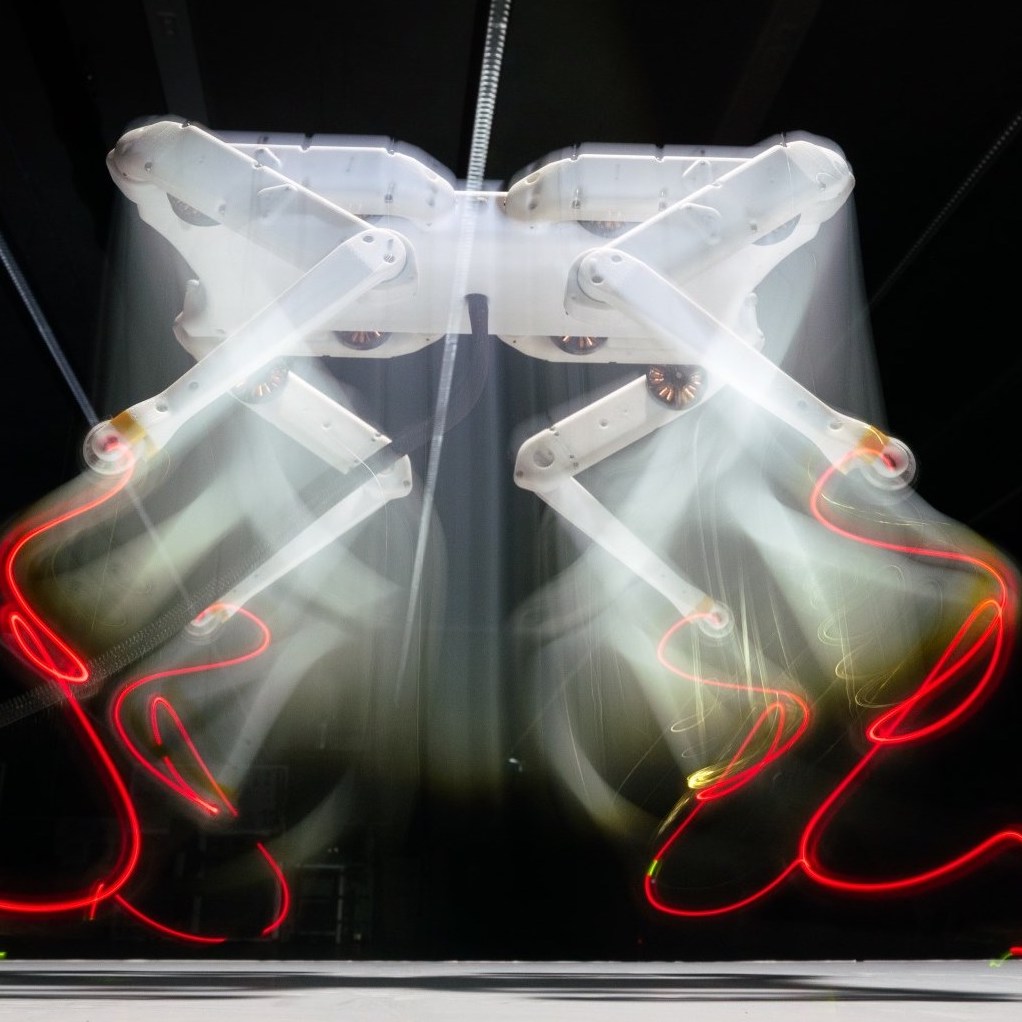
Robots
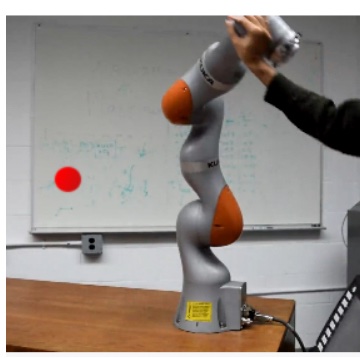
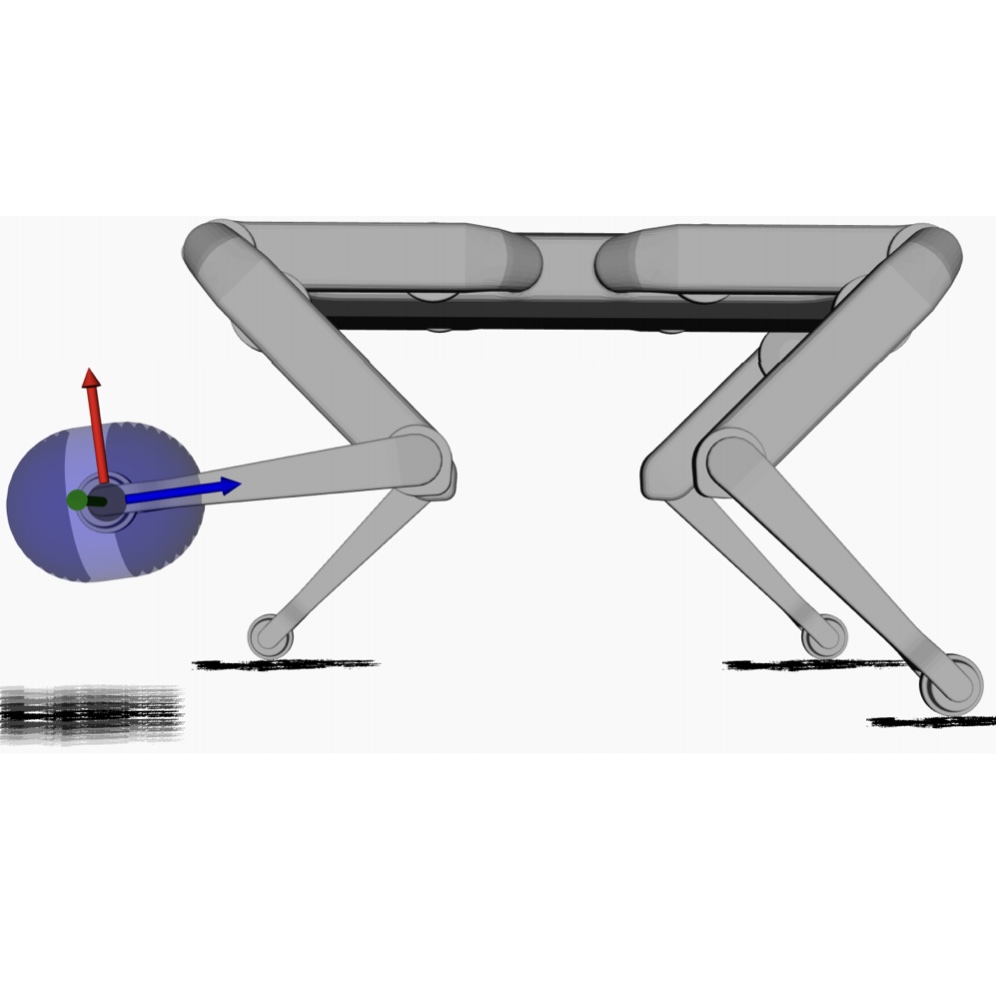
We work with a wide range of robots. Our laboratory has a Sarcos humanoid robot, a Bolt biped, several Solo12 quadrupeds, several manipulation and mobile platforms including a Kuka iiwa14 and a tri-finger platform. Our laboratory consists of a 1000sqft fully sensorized space including a motion capture system. We also conduct large scale, collaborative experiments in a 3000sqft shared robotics experimental facility. The hardware designs of the ODRI robots are open and can be found here. Check out our Youtube channel to see our robots moving!




Sponsors
We are grateful to our sponsors for their generous support. Our current research is mainly supported by National Science Foundation grants 1932187 2026479 2222815 and 2315396 and a generous donation from Wandercraft.
We are also grateful to our previous sponsors and donors, including the European Union’s Horizon 2020 research and innovation programme, the European Research Council, OPPO, Intel, Meta, NYU Wireless, Google and NSF grants 1925079 and 1825993